Sensor Outputs
Device setup
- The Intel RealSense SR300 camera is placed above the Matrix creator with the displacement of 8CM as shown in the image below:

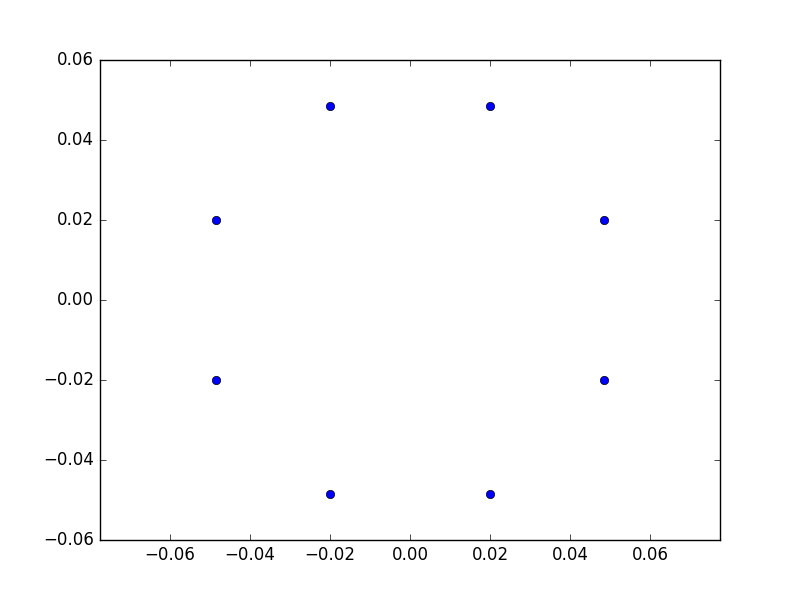
- The Matrix Microphone array is placed such that the mic geometry is as shown below:
Frame Size Calculations
- Field of view: Intel Realsense
- Vertical Field of View: 55 Deg
- Horizontal field of View: 71.5 Deg
- Field of view: Matrix
- Azimuthal plane range: -pi/2 to pi/2
- Polar plane range: -pi/2 to pi/2
- Frame Size: 1.43mx1.04mx1m (Limited by IR camera) (Calculated using the field of view of the Intel Realsense Camera at Depth 1m). Depth is chosen as 1m as the Depth camera has a maximum range as 1.2m.
- Displacement between the center of the IR camera and Matrix: 8cm
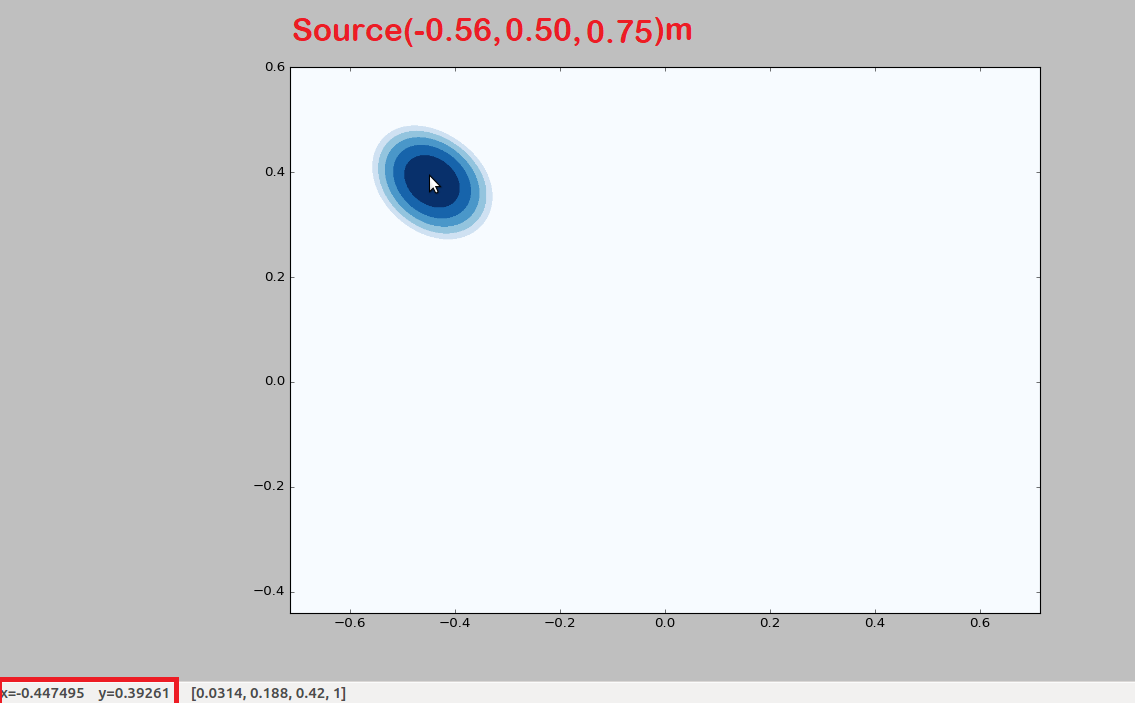
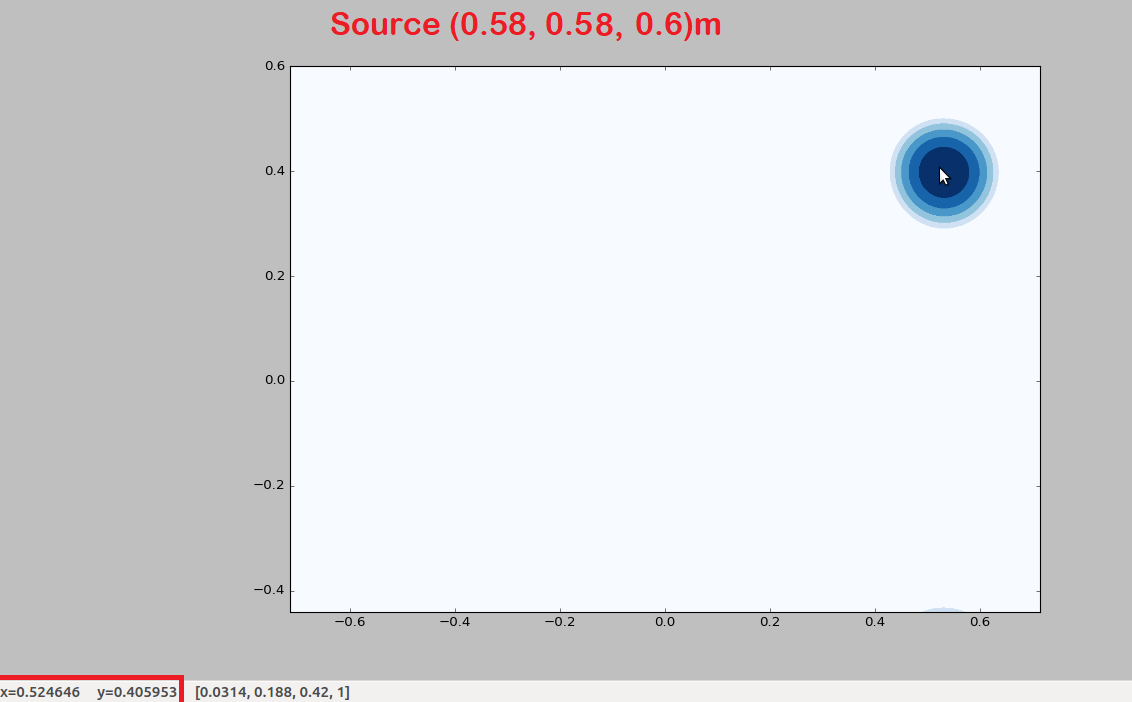
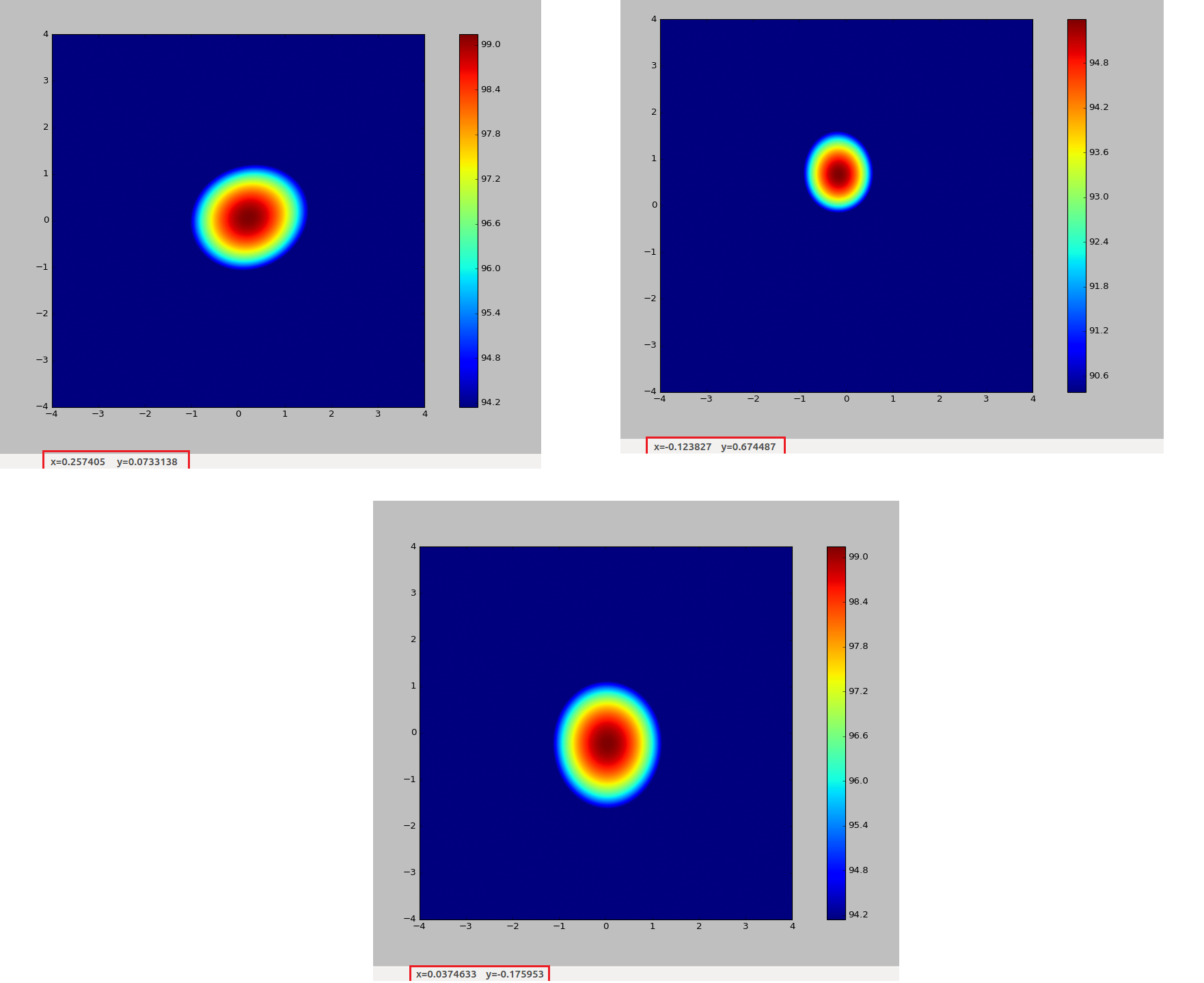
Matrix Results
- Source Location 1:
- Source Location 2:
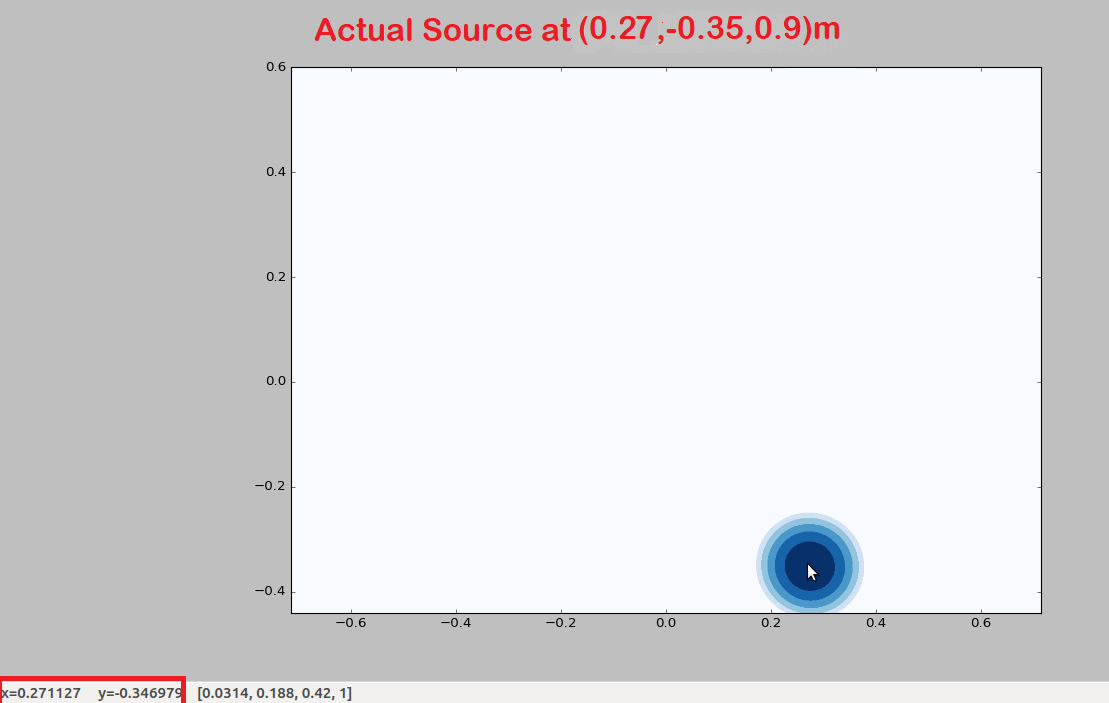
- Source Location 3:
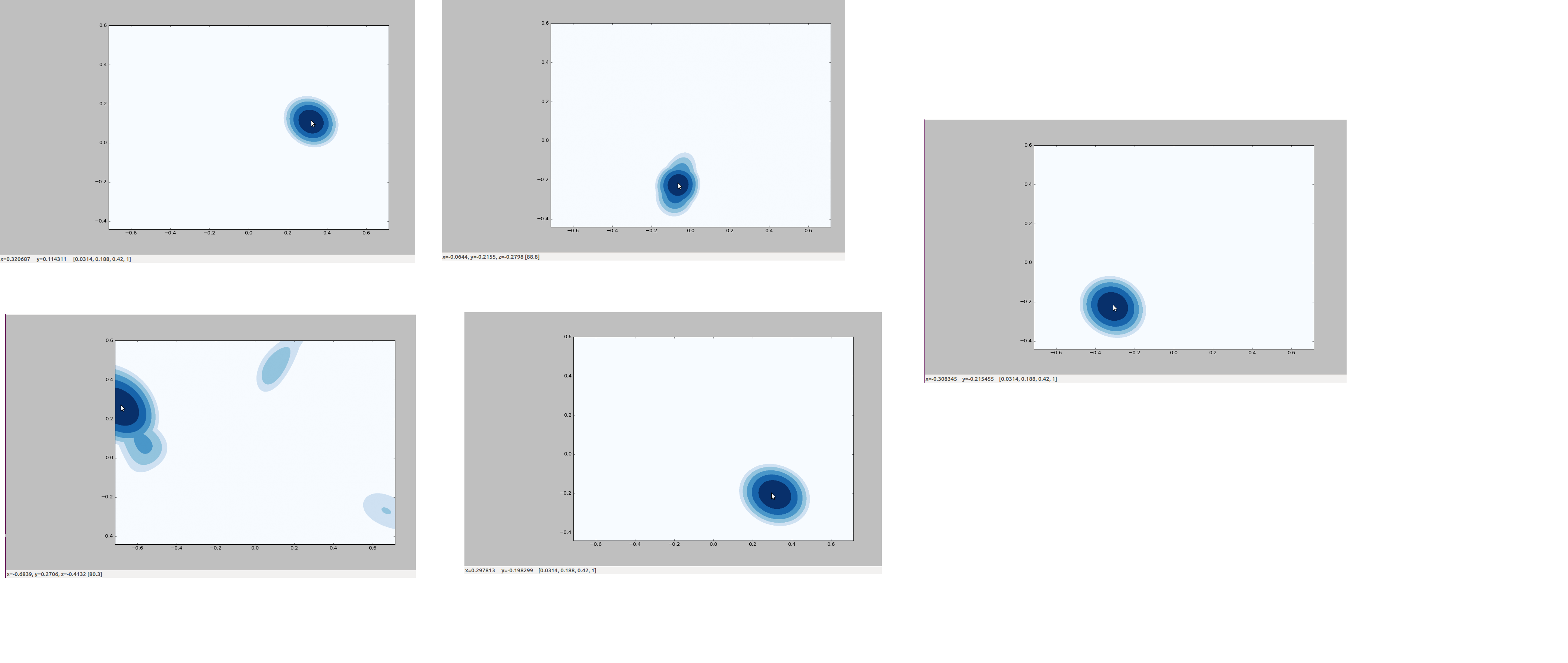
Ground Truth
Ground Truth samples
Ground Truth details
2 Samples at different x,y and depth were take for each quadrant. For each position only one sample was taken since the error values remained very similar to the previous sample.
| Depth(m) | y co-ordinate(m) | Observed y co-ordinate (m) | Error along x direction (m) | Angular error in deg | x co-ordinate(m) | Observed x co-ordinate(m) | Error along y direction(m) | Angular error in deg |
|---|---|---|---|---|---|---|---|---|
| 0.8 | -0.2 | -0.17 | 0.03 | 1.07 | 0 | 0.037 | 0.037 | 1.32 |
| 0.5 | 0.8 | 0.674 | 0.126 | 2.4 | -0.3 | -0.1238 | 0.1762 | 3.361 |
| 0.6 | 0.25 | 0.27 | 0.02 | 0.9 | -0.64 | -0.68 | 0.04 | 1.9 |
| 1 | 0.05 | 0.073 | 0.023 | 0.658 | 0.20 | 0.257 | 0.057 | 1.63 |
| 0.25 | 0.16 | 0.11 | 0.05 | 5.7 | 0.36 | 0.32 | 0.04 | 4.57 |
| 0.75 | -0.13 | -0.21 | 0.07 | 2.67 | 0.23 | -0.06 | 0.29 | 10.9 |
| 0.85 | -0.49 | -0.30 | 0.19 | 6.37 | -0.30 | -0.21 | 0.09 | 3.03 |
| 0.85 | 0.37 | 0.29 | 0.08 | 2.69 | -0.29 | -0.19 | 0.10 | 3.3 |
- Angular Error = Tan-1((error/2)/depth)
- Average Ground Truth = 2.8(along y) , 3.75(along x)
Realsense IR Images
- Source Location 1: (-0.56,0.50,0.75)m
- Source Location 2: (0.58,0.58,0.6)m

- Source Location 3: (0.27,-0.35,0.9)m
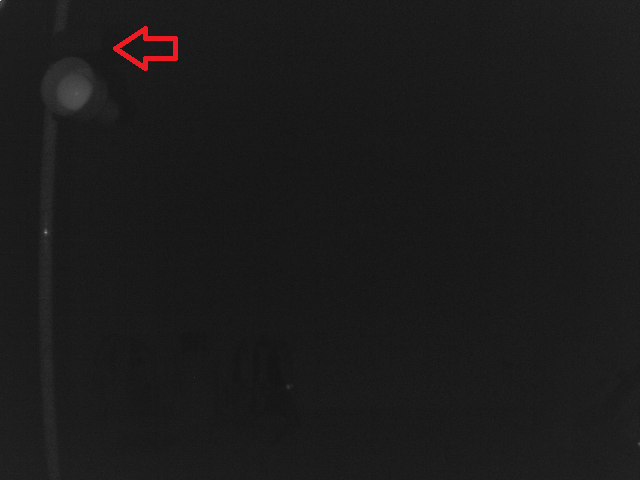
Realsense Depth Images
- Source Location 1: (-0.56,0.50,0.75)m
- Source Location 2: (0.58,0.58,0.6)m
- Source Location 3: (0.27,-0.35,0.9)m